
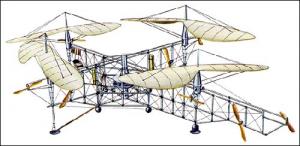
Prvi letalnik s štirimi rotorji je leta 1924 izdelal Francoz Etienne Oehmichen in ta velja za začetnika nove veje letalnikov, čeprav se njegova konfiguracija ni prijela. Plovilo se je imenovalo izumitelju Oehmichen II in je imelo štiri velike rotorje za dvig in še nekaj propelerjev za vodoravni let. Čeprav je bilo težko vodljivo, je zmoglo leteti 360 metrov, kar je Fédération Aéronautique Internationale (FAI) priznala kot prvi rekord nove vrste zračnih plovil, helikopterjev. Po tem je šel razvoj helikopterjev v druge smeri, tako da ima večina današnjih helikopterjev en glavni rotor in dodatni repni rotor za izničevanja vrtilnega momenta. Ideje o drugačnih konfiguracijah pa niso zamrle. Znova so jih obudili, ko je napredek elektronike omogočil izdelavo sistemov za nadzor leta, ki pomagajo pilotu ali upravljavcu robotskega letalnika oziroma modela pri letu.
PREDNOSTI KONFIGURACIJE S ŠTIRIMI ROTORJI
Konfiguracija, ki se v strokovnem jeziku imenuje kvadrotor (kvadrotor), ima nekaj prednosti pred klasično obliko helikopterjev. Prva je, da niso potrebne mehanske povezave za spreminjanje kota lopatic glavnega rotorja, brez katerih bi bil vodoravni let nemogoč, zato je manjša mehanska kompleksnost letalnika. Ker je rotorjev več, so njihovi premeri manjši, to pa pomeni, da je za let potrebno manj energije. Manjše rotorje je lažje vgraditi tako, da so zaščiteni in da pri trku plovila v oviro vanjo trči telo plovila, in ne lopatice rotorjev, ki so veliko občutljivejše, vsaka okvara pa običajno povzroči strmoglavljenje. Zaradi teh prednosti je ameriški proizvajalec letal Boeing skupaj s podjetjem Bell Helicopter predlagal ameriški vojski načrt težkega transportnega helikopterja s štirimi rotorji. Še več si od te konfiguracije obetajo na področju robotskih plovil. V spletu najdete video prikaze letečih prototipov, ki letijo tako zunaj kot znotraj prostorov, so hitri, majhni in imajo dobre manevrske lastnosti.
»PROSTOKODNI« MIKROKOPTERJI
Začetki letalnikov mikrokopter segajo v leto 2006 (oktober tega leta), ko sta Holger Buss in Ingo Busker oblikovala skupino modelarjev, ki so želeli narediti zanimiv in hkrati uporaben model nestandardnega helikopterja. Pol leta pozneje je njun prototip mirno lebdel v zraku ter letal, kot je zapisano na spletni strani, kot ptica. Pozneje so letalniku dodajali komponente, tako da ta danes omogoča na pol samostojen polet, hkrati pa je dovolj močan, da nosi tja do kilogram tovora in ima avtonomijo leta do 40 minut. V ozadju razvoja letalnika ni podjetje, temveč spletna skupnost. Razvoj poteka podobno kot razvoj prostokodne programske opreme.
Najpreprostejša je konfiguracija kvadrokopterja s štirimi navzgor obrnjenimi propelerji – rotorji, ki so nameščeni na nosilce oz. roke, zamaknjene za 90 stopinj. Zanimivi sta še dve konfiguraciji, in sicer heksakopter s šestimi motorji (zamik 60 stopinj) in oktakopter z osmimi (zamik 45 stopinj). Več motorjev, pri izvedenki XL s šestimi motorji so ti tudi močnejši, pomeni možnost prevoza več uporabnega tovora ali pa le večjo zanesljivost. Oktokopter ima enako nosilnost kot heksakopter XL, vendar uporablja manj zmogljive motorje ter lahko leti tudi z okvarjenim rotorjem ali če med letom zadene v oviro.
NAČELO LETENJA
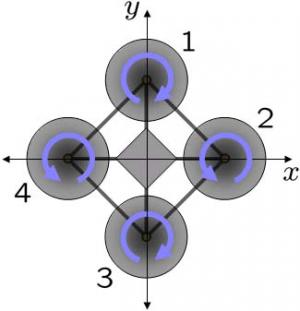
Vsak rotor »proizvaja« potisk,kot tudi vrtilni moment okoli njegovega središča vrtenja in silo upora, nasprotno smeri leta. Če se vsi rotorji vrtijo z enako kotno hitrostjo, prvi in zadnji rotor v smeri urnega kazalca, levi in desni pa v nasprotni smeri, je čisti aerodinamični navor, s tem pa tudi kotni pospešek nihanja okoli osi enak nič. Sile se izenačijo, repni rotor, ki ga poznamo v konvencionalni helikopterski konfiguraciji, pa ni potreben. Podobno delujejo tudi konfiguracije z več kot štirimi rotorji, kjer se jih polovica vrti v eno smeri, druga polovica pa v drugi.
Da model lebdi, se vsi rotorji vrtijo z enako hitrostjo. V teoriji je to lahko, v praksi pa ne, saj so potrebni stalni popravki moči oziroma hitrosti rotacije motorjev, delno zaradi preprostega dejstva, da motorji ali propelerji nikoli niso popolnoma enaki (ali pa morda tok na njih iz različnih vzrokov niha), in ker tudi okoliški zrak ni vedno popolnoma miren. Za to skrbi elektronika, sistem nadzora letenja, ki prek tipal razbira stanje letalnika in izvaja potrebne popravke.
Da letalnik preide iz faze lebdenja v vodoravni let v želeni smeri, ga sistem za nadzor letenja vrže iz stabilnega stanja. Hitrost vrtenja propelerja na nasprotni strani smeri gibanja se poveča, letalnik pa se zato malenkostno nagne v smer letenja. Potisk, ki ga ustvarjajo propelerji, ni več usmerjen pravokotno na zemljo, temveč je malce nagnjen in letalnik se začne premikati v želeni smeri. Če želimo, da leti letalnik naprej, elektronika poveča hitrost vrtenja zadnjega propelerja, za premik nazaj pa poveča vrtenje prednjega.
Na podoben način se letalnik lahko v zraku zavrti, brez izgube višine. Kot primer poglejmo vrtenje v levo (nasprotna smer vrtenja urnega kazalca). Elektronika poveča moč sprednjega in zadnjega rotorja (propelerji se vrtijo hitreje), sočasno pa se malo zmanjša moč na levem in desnem.
Letalnik te konfiguracije nima aerodinamičnih krmil. Zato njihovo funkcijo opravijo motorji, gibanja v prostoru, zavijanje, letanje sem ter tja, vse to je izvedeno s spreminjanjem moči, s tem pa hitrostjo vrtenja rotorjev. S spreminjanjem sile potiska motorjev vplivamo na »roll« (nagibanje levo in desno oziroma premik okoli vzdolžne osi) , »yaw« (vrtenje okoli navpične osi) in »pitch« (dviganje spuščanje nosa – premik okoli prečne osi) letalnika, če uporabimo letalsko izrazoslovje.
SISTEM NADZORA LETENJA
Najmanj, kar od elektronike potrebuje letalnik, so mikrokrmilnik (procesor) in trije žiroskopi (tipala rotacije). 8-bitni 20-megaherčni procesor ATMega 644 (ali 644p) podjetja Atmel je narejen v arhitekturi MIPS, uporaben pa je tudi zato, ker ima lastni pomnilnik (tipa flash) in porabi malo energije. Po en žiroskop, majhna vrtavka, ki se upira spremembam, nadzira po eno os (x, y in z). Podatke zbira programska oprema (firmware) v procesorju, ki stalno računa položaj letalnika v zraku in po potrebi spreminja moč motorjev, s tem pa kompenzira okoliške vplive (veter).
Tipala merjenja pospeška niso nujna, so pa priporočljiva, saj zagotavljajo podatke o pospeških po eni od treh osi. Na primer: podatki vertikalnega tipala pospeška (os Z) so potrebni, da lahko sistem za nadzor letenja izračuna spremembe kota letalnika glede na tla. Za letenje niso nujno potrebni, je pa zato nadzor nad letalnikom lažji, saj sistem lahko samodejno povrne letalnik v vodoravni let (ali lebdenje), namesto da bi se s tem mučil upravitelj prek svojih radijskih krmil.
V sistem za nadzor letenja je možno vključiti tudi tipalo višine (tipalo zračnega tlaka), ki omogoča, da letalnik samodejno leti na določeni višini.
SISTEM NADZORA MOTORJEV IN POVEZAVA
S tem opisa »nujne« elektronike, še nismo končali. Kvadrokopter s štirimi rotorji ima štiri krmilnike motorjev (BL-CTRL), tako imenovani sistem za nadzor motorjev brez ščetk. Uporabili so namreč motorje, ki za prenos energije na rotor motorja ne uporabljajo ščetkV primerjavi z motorji s ščetkami se pri tem motorju magneti vrtijo, tuljava pa ne. Zato pa je za napajanje potreben trifazni izmenični tok, ki ga zagotavlja krmilnik. Vsi ti so na sistem nadzora letenja priključeni prek vodila (I2C).
Elektronika letalnika je opremljena tudi z vmesnikom USB, prek katerega letalnik, ko ne leti, priključimo na računalnik in spreminjamo njegove nastavitve. Programska oprema za spreminjanje nastavitev in prikaz telemetričnih podatkov je prostokodna. Pregled osnovne elektronike letalnika zaključujemo s sprejemniki radijskega signala, prek katerih letalnik dobi ukaze od upravitelja. Tudi te ukaze sprejme sistem nadzora letanja in se primerno odzove. Oddajnik pa je lahko katerikoli komercialni z najmanj štirimi kanali.

DODATNA TIPALA
Najlepša lastnost letalnika je, da omogoča namestitev dodatnih tipal in uporabnega tovora. Slednje največkrat pomeni namestitev fotoaparata za fotografiranje iz zraka. Na slikah, ki krožijo po spletu, lahko vidite celo heksakopter s profesionalnim Canonovim fotoaparatom, čeprav bi se sami, vsaj na začetku, dokler nismo vešči upravljanja letalnika, odločili za kak poceni kompaktni fotoaparat.
Poleg tega lahko v letalnik namestite dodatek za nadzor prek vmesnika bluetooth. Pri tem gre za možnost spreminjanja nastavitev letalnika, ko je na tleh, saj je doseg tega vmesnika premajhen za nadzor v letu. Letalnik lahko opremite tudi z modulom GPS, kar pomeni, da mu poveste, kam naj gre, in letalnik bo tja tudi samodejno odletel, opravil zahtevano opravilo in se vrnil na izhodišče.
Na voljo je tudi dodatek za brezžični prenos podatkov iz letalnika v krmilnik, kar pomeni, da ima upravljavec na krmilo nameščen dodaten zaslon, na katerem vidi sliko kamere. Ali še bolje, upravljavec ima očala za navidezno resničnost in tako nadzira let letalnika.
SAMOGRADNJA, NATO POLET
V spletnih trgovinah najdete tako komplete za samogradnjo kot tudi posamezne dele in dodatke. Komplet za samogradnjo pomeni ravno to − da boste morali pošteno zavihati rokave in imeti tudi nekaj ročnih spretnosti, da boste letalnik zgradili in ga pravilno nastavili. Kljub veliki pomoči elektronike to še ne pomeni, da je upravljanje letalnika preprosto, njegova visoka cena pa tudi preprečuje, da bi se učili na napakah. Zato je dober način učenja upravljanja uporaba brezplačnega simulatorja letenja Simulator FMS. V originalu ta nima podatkov o modelu mikrokopterja, zato je tudi te treba najprej najti v spletu in jih namestiti v programsko mapo. Simulator je tudi dober prikaz zmogljivosti letalnika, ki jih lahko poskusi vsak. Njegova dobra lastnost je tudi ta, da je mogoče nanj priključiti radijska krmila, saj je »letenje« s tipkami na tipkovnici skorajda nemogoče.
Vse več jih je
Omenjene letalnike smo se odločili podrobneje opisati zaradi dejstva, da vsaj dva letita tudi pri nas (več v samostojnem okvirju). Podobni letalniki so glede na količino podatkov v spletu izredno zanimivi v modelarskih krogih, saj je še nekaj podobnih prostokodnih projektov. Še eden evropski je U.A.V.P (Universal Aerial Video Platform) in tudi ta ima za cilj izdelati letalnik s štirimi rotorji za fotografiranje iz zraka, kot pravijo, po razumnih cenah. Poleg tega v spletu najdete tudi načrte, po katerih lahko sami izdelate bolj ali manj zmogljiv letalnik tega tipa. Omenimo še eno zanimivost. Ameriški inštitut MIT je tudi izdelal majhno plovilo, hkrati pa še programsko opremo, aplikacijo za upravljanje letalnika prek iPhona. Namenjen je sicer vojski, poglavitna prednost pa je, da za upravljanje skorajda ni potreben dodaten trening.
Moj mikro, februar 2011 | Marjan Kodelja | Alan Orlič