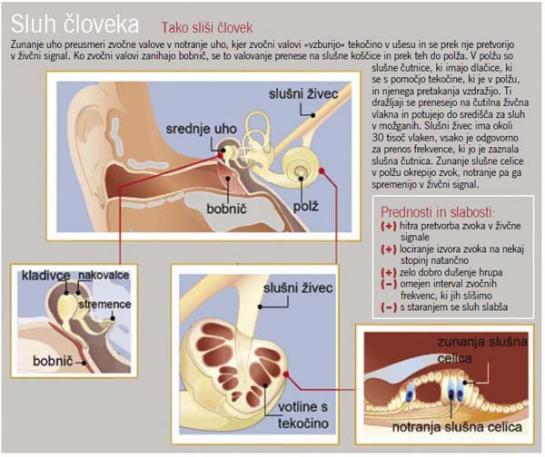
Če vemo, iz katere smeri nam preti nevarnost, ki je ne vidimo, temveč le slišimo, se lahko primerno odzovemo. Zbežimo v nasprotno smer ali se postavimo v obrambni položaj v pravi smeri. Človeška ušesa lahko dokaj zanesljivo zaznajo tako smer kot tudi oddaljenost zvočnega vira zaradi tako imenovanega binauralnega ali dvoušesnega sluha. To človeško lastnost znanstveniki uporabljajo tudi pri različnih napravah. Človeški možgani so namreč sposobni zaznati časovni zamik zvoka med obema ušesoma (Interaural Time Difference - ITD) in tudi razliko v jakosti (Interaural Intensity Difference - IID). Razliko v jakosti povzroči človekova glava, saj se od nje zvok odbija in nastane zvočna senca. Tako je zvok, ki prihaja v eno uho, močnejši, v drugem pa šibkejši. Časovna razlika nastane iz enakega razloga. Če zvok (hitrost je 340 m/s) prihaja z leve strani, ga bo levo uho zaznalo prej kot desno. Hitrost je sicer res velika, a je tudi človeški organizem hiter, saj znajo možgani zaznati oziroma ovrednotiti tudi deset mikrosekundne časovne razlike. Enako načelo vrednotenja časovnega zamika se uporablja tudi v napravah s pomočjo programske opreme. A te so za zdaj bistveno počasnejše od človeškega organizma, saj znajo ločiti oziroma ovrednotiti le zamike nad deset milisekund.
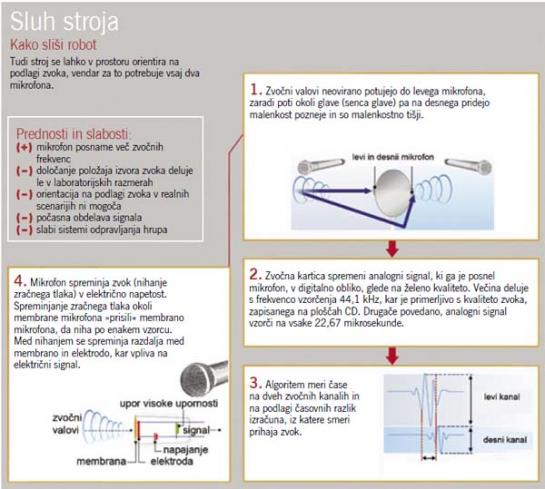
Znanstveniki, ki poskušajo posnemati človeški sluh, uporabljajo dva postopka. Bodisi naredijo umetno glavo, nato pa na mesto levega in desnega ušesa namestijo mikrofona ali pa uporabijo več mikrofonov. Umetni sistemi delujejo zelo dobro v laboratorijskih razmerah, odpovejo pa v realnih situacijah, saj jim, tako kot pri vidu, manjka inteligenca. Tipični primer je zabava, prostor z veliko ljudmi, ki se med seboj pogovarjajo, hkrati pa iz zvočnikov odmeva glasba. Človek je sposoben slediti sogovorniku, stroj pa je zasut z zvokom, saj sistem za filtriranje frekvenc odpove. Za stroj je vse, kar zazna, le hrup, saj ne ve, kateremu zvoku naj sledi, saj ne pozna pojma vsebine. Mi ga poznamo in natančno vemo, kateri zvok moramo izolirati, če se želimo pogovarjati v takšnem okolju.
Posnemanje človeškega sluha je praktične narave, saj bi se te sisteme dalo uporabljati pri boljših napravah za prostoročno telefoniranje, videokonferencah, pa tudi v pametnih mobilnih telefonih. Rešitev filtriranja določenih zvokov ni vedno uporabna, saj na primer filtriranje in utišanje zvoka avtomobilskega motorja vpliva tudi na frekvence govora, ki naj bi ga mikrofon zajel čim čistejšega. Zato v vozila vgrajujejo več mikrofonov, katerih naloga je spremljanje in filtriranje hrupa, tako da ostane le glas voznika. Podoben sistem uporabljajo tudi v pametnih telefonih, ki primerjajo zvok, ki sta ga zajela mikrofon na hrbtni in mikrofon na prednji strani. Zvoke, ki sta jih zaznala oba mikrofona, sistem ne filtrira. Do inteligentnega sistema, ki bi vsaj do neke mere znal posnemati človeški sluh, pa je še dolga pot. Problem je še vedno vsakodnevni hrup, saj se umetni slušni sistemi ne znajo hitro prilagoditi na različne situacije in okolja in se odločiti, kateri zvok izolirati in mu slediti in katerim ne. Doslej so uspeli izdelati le sisteme prepoznave govora, ki so enostavnejši. Oseba, katere govor bo sistem prepoznal, govori neposredno v mikrofon, hrupa skoraj ni, prav tako pa ni pomembno, iz katere smeri zvok prihaja.
Ne bomo še kmalu razvili umetnega sluha, ki bi bil dovolj zmogljiv, da bi le na podlagi zvokov vodil robota. Pričakujejo, da bi se to utegnilo zgoditi, ko bodo robotovi možgani lahko obdelovali signale vzporedno (sočasno). Pa še takrat bo robot moral še v nečem posnemati nas. Tudi mi ne »poslušamo« le z ušesi. Zaslišimo zvok, poskušamo najti izvor z očmi in obrnemo glavo tako, da izvor zvoka določimo natančneje. Kot ne gledamo z očmi, tudi slišimo ne z očmi, temveč z možgani.
Moj mikro, februar 2012 | Marjan Kodelja |