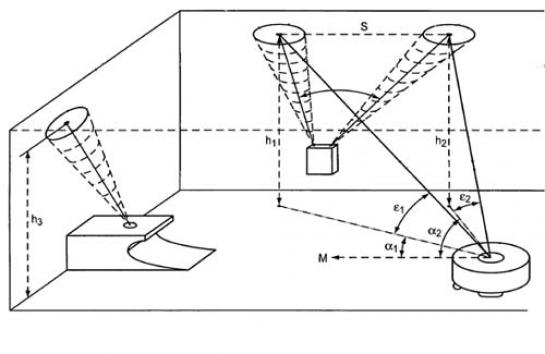
Sistem se imenuje »nebesni navigacijski sistem za avtonomne robote« (Celestial Navigation System for an Autonomous Robot). Infrardeči oddajniki ali oddajniki signalov drugih valovnih dolžin oddajajo signale, ki se odbijajo od sten in stropa, te pa sprejemajo na to valovno dolžini signalov občutljiva tipala na telesu robota. Če povemo to veliko preprosteje: oddajniki na stene in strop »projicirajo« pike, ki jih robot »vidi« in tako izračunava svoj položaj v prostoru. Kot da bi gledal zvezdno nebo. Vključena je tudi izdelava navidezne karte prostora, sistem pa naj bi bil nadgradnja obstoječih tipal na robotskih sesalnikih Roomba. Sistem je na videz podoben NorthStarovemu, vendar je med njima tudi razlika. Ta v vsako IR-točko (signal) vključi lokacijske podatke, zato robotu ni treba »misliti«, roboti naslednje generacije bodo morali sami izračunavati svoj položaj, kar pomeni, da bodo imeli močnejši procesor.
Sistem predvideva, da bo uporabnik kupil ustrezno število oddajnikov, da bo z njimi pokril vse sobe stanovanja oziroma tiste, ki naj bi jih robot očistil. Kar pomeni, da morajo biti oddajniki zelo poceni, ne preveč odvisni od energije, saj si ne predstavljamo, da bi moral uporabnik redno preverjati njihove baterije, in tudi po videzu nevsiljivi, da ne kazijo videza stanovanja. iRobot celo razmišlja o sistemu v robotu, ki bi brezžično napolnil akumulatorje oddajnikov, ko bi se gibal blizu njih (z elektromagnetnimi valovi).
V patentni vlogi je med drugim zapisano, da se lahko robot giblje iz sobe v sobo, od enega oddajnika do drugega, in si hkrati zapomni pot nazaj do polnilne postaje. Vsak oddajnik naj bi imel unikaten zapis signala. Kar dodatno zaplete ves sistem, in morda je v tem tudi razlog, da se tudi nova (peta) generacija Roombe zanaša na star in preizkušen sistem naključnega premikanja. To pa naj še ne bi bilo vse. Prihodnje Roombe naj bi bilo mogoče upravljati tudi prek interneta.
Moj mikro, januar 2012 | Marjan Kodelja