Posnemanje človeškega dotika bo pomembno pri humanoidnih robotskih pomočnikih. Danes umetna roka spusti kozarec, poln vode, ali zmečka plastični kozarček, ker ne »ve«, kako krhki so in iz kakšnega materiala so. Tipični »roboti« s kamero skenirajo prostor in v njem iščejo predmet, na konici mehanskih prstov pa imajo tipala pritiska, da vedo, kako močno so ga zgrabili. Iz česa je predmet, določi robotov vid, ne pa njegova tipala dotika. Človek se zanaša na oboje, na vid in tudi na dotik.
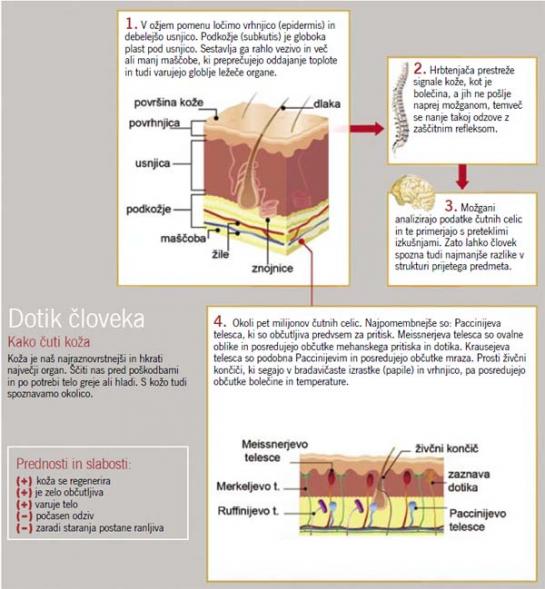
Robot bi potreboval več kot le kamero in nekaj tipal pritiska. Rešitev je v tako imenovani mehanski koži. V človeški koži so prosti živčni končiči, ki se odzivajo na bolečino, in Meissnerjeva telesca, ki nam dajo občutek dotika. Znanstveniki bi radi to posnemali in v enem primeru so izdelali majhne module, v katerih so tipalo temperature, tipalo pospeška in infrardeče bližinsko tipalo (tipalo razdalje). Modul ima površino petih kvadratnih centimetrov, nadzira pa ga 32-bitni mikroprocesor. Vsak modul ima svoj program in ga je treba samostojno nastaviti, prav tako je treba nastaviti tudi robota, ko mu dodajajo module. Metoda deluje, če je modulov na robotu malo - doslej so jih na robota namestili največ 31. Odpove pa, ko bi želeli izdelati res občutljivo kožo robota, kjer bi bili ti moduli manjši in bi jih bilo nekaj sto ali celo nekaj tisoč. Zato iščejo načine, kako izdelati gradnike umetne kože, ki bi se sami nastavili in svojo prisotnost na telesu samodejno oznanili robotovim »možganom«.
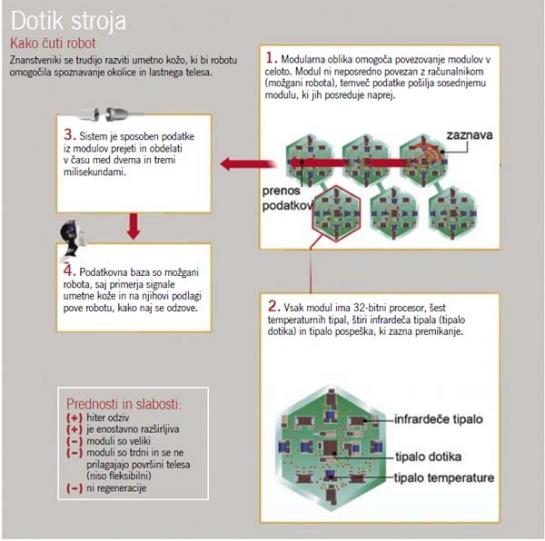
Moduli ne komunicirajo neposredno z računalnikom. Namesto tega ima vsak svojo unikatno identifikacijsko številko, povezan pa je s sosednjim modulom. Podatki potujejo od enega vozlišča do naslednjega, dokler ne pridejo do računalnika. Če kakšen modul odpove, sistem poišče alternativno pot. Čas prenosa podatkov na ta način je kratek, saj modul sporoči podatke v manj kot eni milisekundi. Koliko časa preteče, da pride podatek v računalnik, je odvisno od dolžine poti (števila modulov na poti), vendar naj bi se gibal med dvema in tremi milisekundami. Za primerjavo: človek potrebuje 200 do 300 milisekund, preden se odzove na dražljaj čutne celice v koži.
Umetna koža pa bi morala početi še kaj drugega kot se le odzivati na dotik ali spremembo temperature. Skozi njo bi moral robot spoznavati samega sebe in oceniti, kje se konča njegovo telo in se začne njegova okolica. To bo pomemben korak v smeri inteligentnih strojev, ki bodo znali komunicirati s človekom v njem razumljivi obliki. Za zdaj pa je robotu malo mar, kam se obrne in kako premakne okončine (morda pri tem celo koga ali kaj poškoduje), in ne ve, da na primer ne more dvigniti noge, ker je ta poškodovana. Še vedno bo poskušal hoditi, ker mu tako ukazuje program in ker ne ve, da je nekaj narobe z njegovim telesom. Želja je, da bi umetna koža to spremenila, saj bi njena tipala zaznala vsako »napako«. Robot pa bi se lahko prek nje učil, tako kot se uči otrok, kaj lahko prime, ker je občutek prijeten, in česa ne sme, kar ga bo zabolelo. Bo pa preteklo še nekaj časa, preden bodo moduli postali dovolj majhni in bo vsa umetna koža dovolj elastična oziroma fleksibilna, da se bo prilagodila robotovemu telesu.
Moj mikro, februar 2012 | Marjan Kodelja |