Kljub naporom Googla (tinyurl.com/p9z5tqc) in avtomobilske industrije serijskih vozil z možnostjo samodejne vožnje ne bo pred letom 2025. Morda celo pozneje. Fordovo raziskovalno vozilo, ki smo si ga ogledali v Barceloni, je običajno vozilo model Focus, kateremu so na streho dodali tipala LiDAR, ki oblikujejo tridimenzionalni računalniški model okolice vozila.
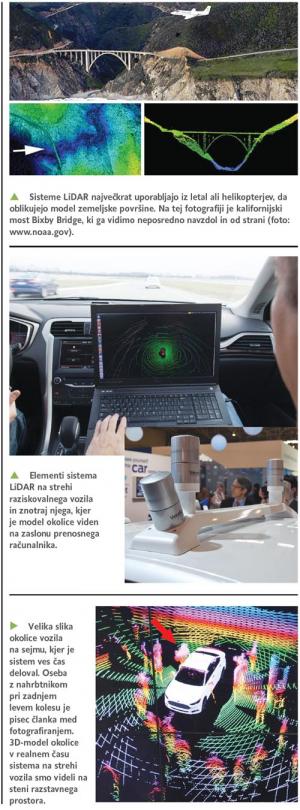
LiDAR (angl.: Light Detection and Ranging) je sistem, ki s pulzirajočimi laserskimi žarki meri oddaljenost od predmetov in je tozadevno podoben bolj znanemu radarju. Ti počnejo enako, le da namesto svetlobe uporabljajo radijske valove. Uporabljajo ga za različne namene, med drugim tudi za zadnje čase priljubljeno skeniranje zgodovinske dediščine, kar prikazuje serija oddaj »Time Scanners« na kanalu National Geographic. Z napravo, ki jo imenujejo tudi laserski skener, so na primer naredili tridimenzionalni model rimskega Koloseja, poleg tega pa jo uporabljajo tudi za izdelavo tridimenzionalnega modela zemeljske površine, le da je sistem v tem primeru v letalu. Sistem sestavljajo trije sklopi, laser, skener (bralnik odbite svetlobe) in natančen sprejemnik GPS. Laser osvetljuje objekt skeniranja s kratkimi pulzi žarkov, skener pa analizira odbito svetlobo ter določi razdaljo od objektov in značilnosti njihove površine. Med seboj se sistemi ločijo po uporabljani valovni dolžini svetlobe. Topografski LiDAR največkrat uporablja svetlobo z valovno dolžino blizu infrardečega spektra, LiDAR, ki je v uporabi za skeniranje dna morja, rek in jezer, pa uporablja zeleno svetlobo, ki prodre skozi vodo.
Sistemi LiDAR so deli skoraj vseh prototipov samodejnih vozil, saj z njihovo pomočjo ti »vidijo« ovire na poti oziroma v vsej svoji okolici. Ford pa skupaj z raziskovalci inštituta MIT dela na algoritmih, s pomočjo katerih se vozilo uči, kam bi se lahko premaknili premikajoči objekti in predvsem pešci v njegovi bližini. Sposobnost načrtovanja, preučevanja vseh možnih scenarijev vozilu omogoča boljše razumevanje okoliških tveganj in mu »daje« sposobnost načrtovanja poti, na kateri se bo varno izognil pešcem, vozilom in morebitnim drugim premikajočim se objektom v bližini.
Skupaj z raziskovalci Stanfordske univerze pa Ford raziskuje, kako bi tipala lahko videla ovire okoli sebe. Ko vozniku pogled naprej blokira na primer velik tovornjak, se previdno premakne na rob voznega pasu, da mimo ovire vidi, kaj je pred njim. Podobno bi se moralo obnašati tudi samodejno vozilo. Njegova tipala bi morala videti mimo ovir. Tako bi se lahko hitro, predvsem pa pravilno odzvala na nepredvidljive dogodke. Če bi na primer tovornjak pred samodejnim vozilom nepričakovano zavrl, bi se vozilo lahko odzvalo z varno spremembo voznega pasu.
Cilj sodelovanja Forda z raziskovalci inštituta MIT in Stanfordske univerze je vozilu dati »razum«. Vozniki dobro razumejo znamenja okoli sebe, znajo napovedati, kaj se lahko zgodi, in vedo, da je tisto, česar ne vidijo, pogosto tako pomembno kot tisto, kar vidijo. Cilj Forda je to intuicijo vključiti v vozila, ki nas bodo čez desetletje ali dva sama vozila po cestah.
Moj mikro, Maj - Junij 2014 | Marjan Kodelja