
Leta 2006 je Lego predstavil robotski komplet Lego Mindstorms (http://tinyurl.com/76o6zto), ki je namesto na klasičnih kockah temeljil na sestavnih delih Technica. Ti sicer res omogočajo več svobode pri oblikovanju modelov iz tehničnega sveta (roboti, stroji), a zahtevajo tudi več znanja in veščin sestavljanja. Če »kock« res ne obvladaš, potem težko narediš kaj več kot le modele, za katere so na voljo podrobna navodila. Osrednji del Legovega kompleta je centralna enota, majhen in ne ravno najbolj zmogljiv računalnik, s tremi izhodi za krmiljenje motorjev in štirimi vhodi za tipala. Ta enota je tudi največja omejitev tega kompleta, saj se kmalu izkaže, da je za kolikor toliko resnega »robota« občutno premalo. Osrednje enote ni mogoče nadgrajevati in tako je omenjena omejitev dokončna. Razen če ne kupimo več osrednjih enot, kar pomeni, da je treba za vsako napisati svoj program in v robotu z več »možgani« predvideti, kako bodo sodelovale med seboj. Preprosta medsebojna povezava namreč ni mogoča. Komplet Mindstorms redkeje vidimo v naših trgovinah (v spletni trgovini eigrace.com zanj zahtevajo 290 evrov), prodajajo ga bolj v tišini, saj programska oprema ni prevedena v slovenščino, pa tudi tehnične podpore ni na voljo. Prodrli pa so v izobraževalne ustanove. Ne toliko na raven devetletke, na višje stopnje pa. Na Fakulteti za računalništvo in informatiko enkrat letno organizirajo celo roboligo, v kateri se pomerijo lego robotki (http://tinyurl.com/7xjzovf).
V slovenskih osnovnih šolah je bil že pred desetletji priljubljen FisherTechnik (www.fischertechnik.si), komplet delov različnih oblik, ki je prav tako namenjen gradnji »tehničnih« modelov, vendar je enostavnejši za sestavljanje od Lego Technica. Podjetje je v preteklosti skoraj propadlo, vendar se je pobralo in danes ponuja tudi najrazličnejše komplete za robotiko. Na slovenski spletni strani ponujajo komplete (najdražji stane okoli 260 evrov), za katere na globalni strani pravijo, da so jih nehali proizvajati in so v prodaji, dokler so še na zalogi. Imajo pa na voljo tudi druge, izpopolnjene komplete, za katere (skoraj) verjamemo, da bodo prej ali slej prišli tudi do nas. Če ne, jih lahko kupite v tujini. Na splošno velja, da je sestavljanje FisherTechnika lažje, modeli pa so tudi bolj podobni pravim robotom. Načelo je podobno kot pri kompletu Lego. Na voljo je nekaj motorjev in tipal, s katerimi skupaj z gradniki sestavimo robota, nato pa zanj prek relativno preprostega programa napišemo program, ki mu »vdahne« življenje. Izobraževalne komplete FisherTechnik, med njimi tudi »robotske«, najdete tudi v slovenskih devetletkah in drugih izobraževalnih ustanovah, manj pa jih kupujejo običajni ljudje, zato jih redko videvamo v slovenskih trgovinah.
Robot Bioloid

Ne za Lego ne za FisherTechnik ne moremo reči, da so njuni kompleti res najbolj primerni za učenje robotike, še manj pa za to, da bi jih ljudje kupovali za hobi. Obstajajo namreč mogoče manj znani, a bolj zanimivi kompleti. Takšni so na primer robotski kompleti Bioloid južnokorejskega podjetja Robotis (www.robotis.com). Podjetje ponuja več robotov in kompletov za sestavljanje, vendar je ta družina cenovno primerna (glej razpredelnico) tudi za običajne ljudi, ne zgolj za izobraževalne ustanove. Tudi na videz so modeli narejeni iz gradnikov, bolj podobni tistemu, kar si v podzavesti predstavljamo kot robota.
»Sklepi in mišice« robota
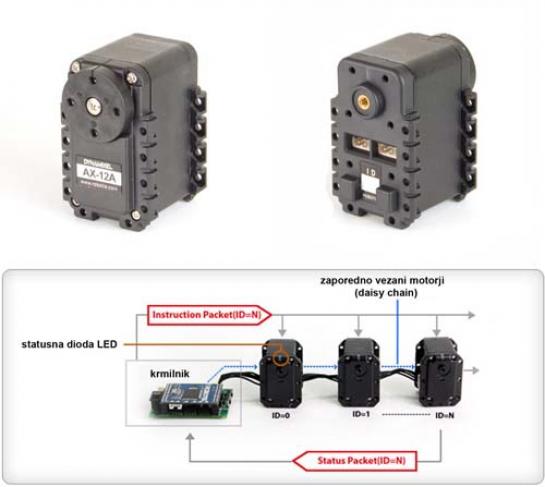
Robota sestavimo iz serije malih, a dokaj močnih koračnih (servo)motorjev, ki jih med seboj povežemo z deli okvirja, na podoben način, kot so mišice pri človeku pritrjene na kosti. Motorji zagotavljajo silo gibanja, deli okvirja pa vse skupaj držijo skupaj v pravilni obliki (obliki robota) in spremenijo silo gibanja v premikanje robota. Koračne motorje izdeluje podjetje samo, oglašuje jih pod znamko Dynamixel, v ohišju pa je poleg električnega motorja tudi krmilna elektronika. V humanoidnem robotu, robotu v obliki človeka, je osemnajst motorjev, a tudi za manj je mogoče oblikovati zanimive robote, po potrebi pa lahko nove motorje kupujemo tudi posebej, tako da nismo omejeni na to, kar dobimo v kompletih. In če pri humanoidnem robotu nekako velja, da vsak motor predstavlja en sklep telesa, potem je možnost nakupa posameznih motorjev dobra možnost.
Standardni modul s koračnim motorjem AX-12 ima po vsem ohišju razporejene točke – luknje, prek katerih ga lahko na različne načine (postavitve) privijemo na okvir. Zaradi tega je oblikovanje robota dokaj preprosto, saj imamo na voljo veliko možnosti. Bolj izrazita je plošča (disk), ki jo vrti motor in ki ima prav tako luknje za privijanje delov telesa robota. Motor se vrsti s hitrostjo 59 obratov na minuto in ima ločljivost 1024, kar pomeni, da se lahko natančno ustavi na katerem koli od 1024 položajev v 360-stopinjskem krogu. Bolj ali manj je s tem jasno, kako gradimo robota. Del okvirja, nadaljevanje telesa, ki je privit na disk motorja, se premika, vrti, ohišje motorja pa je trdno pritrjeno na del okvirja, ki je spet lahko pritrjeno na drug motor in tako naprej, dokler ne naredimo robota po svojem lastnem načrtu. Seveda pa je nekaj pameti pri tem treba uporabiti, saj moramo predvideti, kako želimo, da se bo robot gibal, in temu prilagodimo njegovo konstrukcijo. To pa pomeni, da moramo vedeti vsaj najosnovnejša načela robotike.
Motor ima dva priključka. Z enim se poveže z motorjem »nad« njim, z drugim z motorjem »pod« njim. Motorji niso povezani s svojim lastnim kablom na osrednji krmilnik, temveč tvorijo mrežo, verigo, ki posreduje krmilne signale do ustreznega motorja, hkrati pa tudi energijo za njihovo delovanje. Veriga je na enem koncu priključena v krmilnik. Takšna arhitektura ima kar nekaj prednosti. Krmilnik tako na primer ne potrebuje toliko izhodov (vhodov), kot ima robot motorjev ali tipal, hkrati pa so kabli kratki in enako dolgi in ne motijo robota pri premikanju.
Motorji se ves čas »sporazumevajo« med seboj in z osrednjim krmilnikom po dvosmerni mreži (signali potujejo v obeh smereh), podobno kot deluje domače računalniško omrežje. Hitrost prenosa v »mreži« znaša 1 Mb na sekundo, kar v praksi zaradi dokaj majhne količine podatkov pomeni, da gre za prenos v realnem času. Motorji krmilniku nenehno sporočajo svoj položaj in hitrost premikanja, zato krmilnik pozna relativni položaj vsakega motorja glede na položaje drugih in mu ni treba »ugibati«, kje so. Zaradi povratne zanke lahko robota naučimo novega položaja preprosto tako, da ga ročno postavimo vanj. Krmilnik nato pridobi od motorjev potrebne podatke in je pozneje sposoben kadar koli ta položaj robota ponoviti.
»Možgani« robota
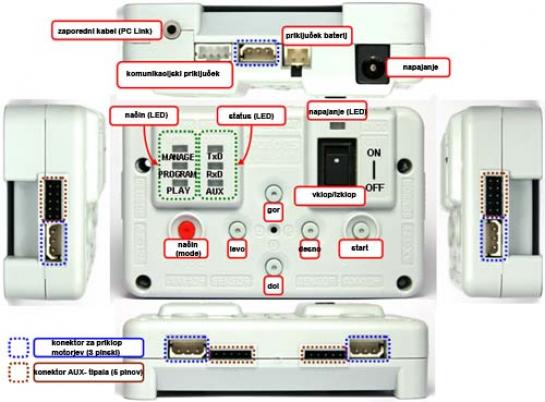
Funkcijo možganov v robotu prevzame osrednji krmilnik (centralni procesni modul). V Bioloidovih kompletih srečamo dva, CM5 in CM-510, ki sta si glede načela delovanja zelo podobna. Krmilnik ima pet priključkov za priklop verig motorjev, priključek za baterijo in priključke (vhode) za tipala. Na ohišju krmilnika je serija gumbov za zagon programiranih gibanj robota, svetlečih diod, ki kažejo statusne informacije, tu pa je tudi zaporedni vmesnik za povezavo z računalnikom. Ker računalnika s klasičnim zaporednim vmesnikom skorajda ne boste več našli, je na voljo tudi pretvornik iz tega vmesnika v vmesnik USB. Krmilnik ima vgrajen 16-MHz procesor in 256 KB pomnilnika in je v bistvu majhen računalnik. Enako velik pomnilnik ima tudi centralna enota Legovega kompleta, velikost pa naj bi zadoščala za programe (ukaze), ki so potrebni za premikanje robota. Programiranje robota je razdeljeno na dva dela, najprej definiramo vsa mogoča gibanja, na primer korak, obrat v levo in podobno, nato pa še povemo, v kakšnem zaporedju naj se različna gibanja izvedejo, kolikokrat naj se kakšno ponovi in tako naprej, da bo naš robot hodil, se kotalil, plezal in še kaj.
Energijo zagotavljajo baterije, ki jih običajno namestimo blizu krmilnika. Nameščene so v lastni okvir, tako da jih lahko vzamemo iz robota in nadomestimo z novimi, polnimi. Na spletni strani podjetja je zapisano, da so v cenejših kompletih nikelj-metalne baterije, v najboljšem, a še vedno cenovno relativno ugodnem kompletu, pa litij-polimerske. Te uporabljajo namesto litij-ionskih, saj so sposobne zagotoviti višji tok. Najboljše 11.1 V baterije imajo kapaciteto 1000 mAh, kar naj bi zadoščalo za trideset minut občasne aktivnosti robota ali deset minut polnega delovanja. Ker je to relativno malo, je priporočljiv nakup dodatnih baterij.
»Čutila« robota
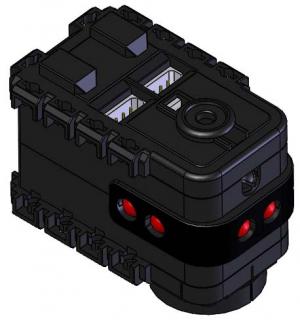
Poleg tega, da je robot sposoben premikanja v prostoru, mora tudi zaznavati svojo okolico. Na primer ovire na poti. Zaznavanje poteka prek tipal. Cenejšima kompletoma (glej razpredelnico) je dodana enota AX-S1. V ohišju so tri infrardeča tipala za merjenje razdalje, eno je usmerjeno naprej, drugi dve pa vstran, ter dodatno, tudi infrardeče tipalo, za daljinski upravljalnik robota. Znotraj je tudi mikrofon, ki je sposoben zaznati jakost zvoka kot tudi ponavljajoče se zvoke. Zna prešteti, kolikokrat ste zaploskali, in se temu primerno, kot zapoveduje program, odzvati. Dodan je tudi brenčač, tako da se lahko robot tudi oglaša.
V najbolj izpopolnjenem kompletu so tipala samostojna in niso vgrajena v eno enoto. V njem je infrardeče tipalo zmogljivejše in krmilniku sporoča natančno razdaljo do ovire, v preprostejših (cenejših modelih) pa le približno. Tu je tudi dvoosni žiroskop, ki pomaga krmilniku pri stabilizaciji robota, robot pa je zaradi tega sposoben hoditi tudi po neravni podlagi, saj žiroskop zazna nevarne nagibe, krmilnik pa se lahko ustrezno odzove in prepreči padec.
»Skelet« robota

Krmilnik, baterije in motorji predstavljajo večino robota, prepoznavno obliko pa mu dajejo deli okvirja, ki predstavljajo njegov neke vrste skelet. Kompleti v razpredelnici se razlikujejo tudi po okvirjih robota. Kot kaže, so vsi narejeni iz močnega plastičnega materiala, pri paketu za začetnike je telo v enem kosu, dodanih je še nekaj koščkov za roke in noge, pri drugih dveh kompletih pa je več manjših koščkov, ki jih sestavljamo v skelet. Najdražjemu kompletu so dodana podrobna navodila za sestavo 26 različnih modelov robota. V nasprotju z lego kockami in FisherTechnikom je razstavljanje in ponovno sestavljanje precej zamudno, saj zahteva odvijanje in zavijanje več manjših vijakov, je pa zato robot, ko ga enkrat sestavimo, bolj kompakten.
Seveda je zadovoljstvo večje, če sestavimo robota čisto po svojem načrtu. Delov je načeloma dovolj, če pa jih ni, jih je mogoče kupiti posebej. Enako velja za tipala. Omejitev je tako le graditeljeva domišljija. Ko enkrat naredite robota, ki se lahko premika, sledi pisanje programa, ki mu omogoči, da se prosto giblje v prostoru in na poti izogiba oviram. Ko boste enkrat tako daleč, boste ugotovili, da se bo vaše zanimanje za robota šele prav začelo. Dobili boste nove zamisli, kako nadgraditi in izboljšati svojega robota, mu dodati nove motorje in tipala ter napisati boljši program. A bodite opozorjeni – igrača je takšna, da človek kaj hitro postane z njo zasvojen, in utegne se zgoditi, da boste z dodatki precej oskubili družinski proračun. A se po našem mnenju izplača.
»Okrepljeni« Bioloid

Od v razpredelnici omenjenih kompletov družine Bioloid največ omogoča komplet Premium, in če smo pošteni, njegova cena ni ravno takšna, da bi takoj skočili v spletno trgovino in ga kupili. A tudi to ni največ, kar ponujajo. Obstaja namreč še bolj izpopolnjen komplet, imenovan GP (Grand Prix), za katerega želijo imeti kar okoli 2500 evrov.
Komplet Bioloid GP je osredotočen na gradnjo močnejših humanoidnih robotov za igranje nogometa ali boksanja robotov med seboj. Osrednji krmilnik je enak kot v paketu Premium, izboljšana je programska oprema, namesto osemnajstih motorjev AX-12A je teh šest in so namenjeni premikanju zgornjih okončin, spodnje okončine premika deset motorjev AX-18F, ogrodje robota (deli okvirja) pa je iz trdnejše aluminijeve zlitine. Nov motor je na zunaj enako velik, vendar zmogljivejši. Navor je osemnajst kilogramov na centimeter (AX-12A petnajst kilogramov na centimeter), hitrost vrtenja pa znaša 97 obratov na minuto (skoraj enkrat več od manj zmogljivega motorja).

A tudi tu ni konec. Še bolj izpopolnjen model je robot DARwin-Op, za katerega želijo imeti več kot deset tisoč evrov. Robot je visok skoraj pol metra, tehta slabe tri kilograme in je tako največji robot družine Bioloid. Pod kovinsko kožo je podobna arhitektura kot pri prej opisanih, le da so vsi deli prilagojeni gradnji humanoidnih robotov. Vsak njegov del je nadgrajen, zato je ta robot močnejši, hitrejši in tudi pametnejši. Uporabljeni so koračni motorji MX-28, ki so štirikrat bolj natančni in lahko prenašajo podatke med seboj trikrat hitreje kot prej omenjeni motorji. V robotu je dvajset takih motorjev, šest v vsaki nogi, po tri v rokah in dva v vratu. V eni sekundi »preteče« 24 centimetrov, če pade, pa se zna pobrati v slabih treh sekundah. Ker je padec zelo verjeten, ima vgrajen triosni žiroskop.
Krmilna enota je računalnik s procesorjem Intel Atom Z530, ima 4 GB pomnilnika (pogon SSD), vrata za omrežje (Ethernet), vmesnik Wi-Fi, vmesnike USB ter vmesnik HDMI. Nanj lahko priključite zaslon in mu nadgradite program, ne da bi potrebovali računalnik. Vgrajeno ima kamero ločljivosti dva milijona pik in je sposoben analizirati njeno sliko, obračati glavo in slediti predmetom v vidnem polju ali tekati za žogo, ko je vključen način igranja nogometa. Prav tako ima vgrajena dva mikrofona, saj v stereotehniki analizira okoliški zvok in zna določiti njegov izvor.
| Komplet za začetnike | Osnovni komplet | Komplet Premium | |
| Osrednji krmilnik | CM-5 | CM-5 | CM-510 |
| Število različnih robotov | 14 | 26 | 26 |
| Enote koračnih motorjev AX-12A | 4 | 18 | 18 |
| Tipala | AX-S1 | AX-S1 | IR-sprejemnik, IR-merilnik razdalje, žiroskop |
| Programska oprema | Bioloid (mogoča nadgradnja na RoboPlus) | Bioloid (mogoča nadgradnja na RoboPlus) | RoboPlus |
| Baterije | Ni-MH 9,6 V | Ni-MH 9,6 V | Li-Po 11,1 V |
| Približna cena z davkom | 315 € | 835 € | 1091 € |
| Cene smo našli v angleški spletni trgovini http://robosavvy.com/ ter jih za lažje razumevanje pretvorili v evre. | |||
Moj mikro, april 2012 | Jan Kosmač