
»To me spominja na šalo o izpopolnjenosti sodobnih potniških letal. Kakšna je njegova idealna posadka? Pilot in pes. Pilot zato, da spremlja informacije o letu, in pes, da pilota ugrizne v roko, če se želi dotakniti stikal.«
Začetki razvoja avtonomnih vozil segajo daleč v zgodovino, saj so se vzporedno z razvojem računalnikov pojavile zamisli, da bi računalnik morda znal namesto človeka upravljati avtomobil. A zamisli so eno, realni tehnološki razvoj pa nekaj drugega. Prva avtonomna vozila so se pojavila po prelomu stoletja. Prototip »junior« univerze Stanford, predelan Volkswagnov passat iz leta 2008, je sam vozil po praznem poligonu s hitrostjo 40 kilometrov na uro. Danes lahko Googlov prototip, ki je, mimogrede, navzven zelo podoben Googlovim vozilom, ki krožijo po svetovnih mestih in zajemajo podatke za storitev Streetview, vozi s hitrostjo do 110 km/h po čisto običajni prometnici, z vsemi ostalimi udeleženci v prometu. Zazna pešce, kolesarje in ostala vozila, razume svetlobne signale semaforjev in se drži predpisane hitrosti. Konec lanskega leta je svoj prototip pokazal nemški proizvajalec BMW. Predelan avtomobil serije 5 je zapeljal po avtocesti med Münchnom in Nürnbergom, v razvoju svojih modelov pa ne zaostajajo niti ostali proizvajalci, kot so VW, Audi, Mercedes, in nekateri univerzitetni laboratoriji.
Googlov prius

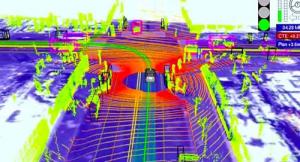
Google je za svoje avtonomno vozilo izbral Toyotinega priusa in ga ustrezno predelal. Pred sovoznikom je nameščen zaslon, na katerem »potnik« spremlja, kako avtomobil vidi okolico, kako zaznava vozni pas in ostaja na njem, kako vidi prometne znake in udeležence v prometu, prikazani pa sta tudi njihova hitrost in smer (vektorji) gibanja. Kljub avtonomnosti vozila nekatere funkcije še vedno opravlja voznik. Ta mu s pritiskom na gumb blizu zaslona ukaže, naj zamenja vozni pas, vozilo pa potem to stori, a šele ko preveri, ali je nov vozni pas prost, ali se na njem hitro bliža vozilo in podobno. Sistem ves čas spremlja okolico, išče »tarče«, izračunava njihovo gibanje in celo predvidi, kje bodo čez nekaj časa. Znano je, da se lahko sistemi za preprečevanje trka, ki so že vgrajeni v nekatere modele avtomobilov, odzivajo hitreje kot človek. Če se na vozišču pojavi ovira, jo sistem zazna skoraj v trenutku in vozilo zavre veliko prej, kot bi bil tega sposoben tudi najboljši voznik.
Zanimivo je, kako se sistem odzove na situacije, s katerimi se vozniki srečujemo vsak dan. Po vključevalnem pasu se nam od zadaj bliža vozilo. Kaj storiti? Pospešiti, da se bo vključilo na vozni pas za nami, ali upočasniti vožnjo in ga spustiti predse? Sistem se lahko odloči za prvo različico, torej da pospeši, a si lahko tudi »premisli« glede na nove podatke, ki mu jih zagotavljajo tipala. Na primer bližajoče se vozilo nenadoma pospeši ali pa sistem zazna bližnje vozilo na sosednjem voznem pasu in zato toliko upočasni vozilo, da se to ne bi znašlo v mrtvem kotu tega voznika. Prednost sistema pred človekom je, da razmišlja hitreje, hkrati pa »vidi« vse okoli sebe in, tako kot človeški voznik, ne pozabi redno pogledati v vzvratno ogledalo. Zato ima na voljo veliko več informacij iz svoje okolice in se lahko na nenadne situacije odziva hitreje, poleg tega ga nikoli ne zgrabi panika, pa tudi zjezi se ne zaradi neumnosti drugih voznikov.
Avto je sam »dojel« pravila
Google poskuša problem samodejne vožnje rešiti na nekonvencionalni način oziroma njemu lasten način. Za Google je tudi vožnja nič drugega kot velika količina podatkov, zato »računalnika« ne uči, kako naj vozi. Flota njegovih robotskih priusov med samodejno vožnjo, ki zahteva le občasne posege človeka, zbira podatke. Prevozila naj bi že več kot tristo tisoč kilometrov in sproti zapisovala vse, kar so »videla«, algoritmi pa so iz pridobljenih podatkov »ugotovili« pravila, ki veljajo v cestnem prometu. Z drugimi besedami - sistem se je učil, kako vozimo ljudje, zato da bi znal predvideti naše odzive. V tem je tudi razlika, kako se je zadeve lotil Google in kako proizvajalci avtomobilov. Google želi narediti računalnik, ki vozi, avtomobilski proizvajalci pa vozilo, ki vozi kot računalnik.
Srce, če temu lahko tako rečemo, Googlovih vozil je laserska naprava na strehah vozil, ki izdela 3D-podobo okolice. Gre za Velodynovo napravo s 64 laserskimi žarki, ki se vrti s hitrostjo 900 obratov na minuto in »izdela« podrobno 3D-podobo okolice vozila. Sistem vozila podatke laserskega merjenja razdalj, to namreč počne to tipalo, kombinira z zemljevidi visoke ločljivosti in oblikuje različne tipe podatkovnih modelov. Tako pridobljeni podatki vozilu omogočijo samostojno vožnjo, med katero se izogiba oviram in spoštuje prometna pravila. V vozilu so še druga tipala. Štirje radarji, nameščeni na prednjih in zadnjih odbijačih, »vidijo« dovolj daleč, da se vozilo obnese v hitrejšem prometu na avtocesti. Kamera, nameščena blizu vzvratnega ogledala, spremlja semaforje, sprejemnik GPS, tipalo inercije in tipalo za štetje obratov koles pa skrbijo za spremljanje gibanja vozila. Samo sprejemnik GPS ne bi bil dovolj, saj če ne bi njegovih podatkov kombinirali z zemljevidi in podatki drugih tipal, bi lahko bila napaka v določanju trenutnega položaja velika nekaj metrov, kar je absolutno preveč za samodejno vožnjo.
Čeprav se Googlovo vozilo relativno dobro znajde v prometu, je sistem še daleč od ravni, ki je potrebna za vgradnjo v avtomobile. Preden ga pošljejo na »pot«, Googlovi inženirji načrtovano pot enkrat ali celo večkrat prevozijo, pri tem pa zbirajo podatke o okolici. Ko gre po poti samodejno vozilo, podatke, ki mu jih sporočajo tipala na »krovu«, primerja s prej pridobljenimi podatki. Vozilo ve za vse nepremične ovire na poti, spremljati mora udeležence v prometu in morda ovire, ki so bile postavljene na pot pozneje. Na primer vozilo se ustavi na križišču, saj prepozna rdečo luč. Ko zazna zeleno luč, počasi spelje in zavije levo, pri tem pa mora paziti na pešce, ki so se zadnji hip odločili, da prečkajo cesto. Manever je zato počasen. Včasih pa mora biti vozilo agresivnejše. Vozilo se bliža križišču, natančno pozna desno pravilo, torej ve, kdo ima prednost, vendar se tega ostala vozila ne držijo. Zato mora vozilo nekoliko napredovati v križišče, da ostalim voznikom pokaže, kakšen je njegov namen. Brez programiranja takšnega obnašanja vozilo ne bi moglo samodejno voziti v prometu.

Avtomatizirani BMW
Lansko leto, prometa polna nemška avtocesta A9 med mestoma München in Nürnberg. Kljub gostemu prometu je voznik predelanega vozila serije 5 miren, saj je njegovo vozilo visoko avtomatizirano. Samodejno namreč zavira, pospešuje in spušča pred seboj druga vozila ter hkrati spremlja promet okoli sebe. To vozilo je doslej prevozilo že 5000 kilometrov. BMW-jevi inženirji so nekaj let razvijali elektronskega avtopilota, ki je v določenih razmerah sposoben samodejne vožnje. Najprej na poligonih, kjer je vozilo peljalo samodejno, nato pa so preizkušali podsistem za samodejno zaviranje v sili in tempomat, ki se prilagaja prometu okoli sebe. Njihov naslednji cilj je sistem za samodejno vožnjo po avtocestah. Za dosego tega je testno vozilo opremljeno z inteligentnim programom, podprtim s podatki tipal, nameščenih po vsem vozilu. Samodejna vožnja po avtocesti se aktivira s pritiskom na gumb, od tu naprej pa prototipno vozilo samo zavira, pospešuje in prehiteva počasnejša vozila. Kot velik izziv so se izkazali uvozi na avtocesto, torej vključevanje drugih vozil na avtocesto. Sistem se odziva na situacijo s pospeševanjem ali zaviranjem, po potrebi pa lahko vozilo zamenja vozni pas. Samodejni sistem deluje do hitrosti 130 km/h, spoštuje pa tudi prometne predpise, omejitve hitrosti in neprekinjene cestne črte. Kljub avtomatizaciji mora voznik še vedno spremljati vožnjo in se po potrebi odzivati, kar pomeni, da BMW-jev prototip ni tako avtomatiziran kot Googlov.

Podobno kot pri Googlovem vozilu je tudi pri BMW-jevem pomembno dvoje: vozilo mora natančno poznati svoj trenutni položaj v prostoru, torej tudi položaj na voznem pasu, sposobno pa mora biti tudi čim bolj natančno spremljati druge udeležence v prometu v svoji bližnji okolici. Zato je opremljeno s tipali, kot so LIDAR (Light Detection And Ranging - sistem merjenja razdalje s pomočjo svetlobe, najpogosteje laserja), radar, ultrazvočno tipalo bližine in kamere. Pomembna je tudi redundanca, kar v praksi pomeni, da vsak podatek zagotovita vsaj dva neodvisna podsistema. Vozilo ima sprejemnik GPS, podprt z zemljevidi visoke ločljivosti, saj mora poznati tudi konfiguracijo poti pred seboj (na primer spremembo števila voznih pasov). Podatke o tem, kaj je pred njim, mu zagotovijo naprej obrnjene kamere, ki so integrirane v sistem za zaznavo voznega pasu. Oviro na poti zaznata radar in laserski daljinomer LIDAR, ta podsistema pa zaznata tudi ovire za in ob vozilu.
BMW-jevi inženirji nameravajo prototipni sistem v naslednjem koraku »naučiti«, kako naj se odzove na dela na cestah in kako se mora obnašati na avtocestnih križiščih. Delovišča na cestah so problem, saj so vseh mogočih oblik, kar oteži vozilu odločanje, kako naj se odzove.
Avtomatika priskoči na pomoč
Opisani vozili sta prototipa. V serijskih modelih za zdaj najdemo le avtomatizirane sisteme, ki so v pomoč voznikom. V srednji razred se vgrajujejo (proti plačilu seveda) sistemi za samodejno bočno parkiranje in samodejno ustavljanje v sili, luksuzni modeli pa imajo takih sistemov več. Pristopi se od podjetja do podjetja razlikujejo. Mercedes na primer bolj kot o vozilu, ki bi popolnoma samo vozilo, razmišlja o sistemih, ki bi voznika razbremenili in ga opozarjali na nevarnost.
V nekatere modele so že vgradili sistem za pomoč vozniku (Attention Assistance), ki ima 70 elementov, ki nadzirajo skoraj vse, tudi pravilno uporabo smernika. Če vozilo zapelje v predor, se armaturna plošča osvetli, ko se v mrtvem kotu znajde drugo vozilo, se na površini vzvratnih ogledal pojavi svarilni znak, če hoče voznik kljub temu zamenjati vozni pas, znak začne utripati, zasliši pa se tudi svarilni zvok. Če vozilo zanese z voznega pasu, volan nežno trese. Tempomat se zaveda okolice, tako da ne ohranja želene hitrosti, temveč to prilagaja, da ohrani pravo varnostno razdaljo. Če voznik ne upošteva opozoril in sistem zazna visoko verjetnost trka, aktivira samodejno zaviranje v sili in hitro odpiranje oken. Če bi prišlo do trka, bi imele zračne blazine dovolj prostora, da zaščitijo voznika. Mercedesov sistem je torej polavtomatiziran računalnik na kolesih, ki ima 60 elektronskih nadzornih enot in nekaj deset milijonov vrstic programske kode.
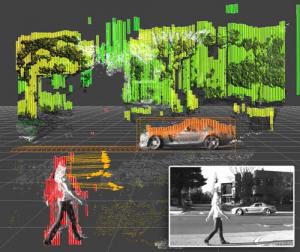
Mercedes razvija tudi sistem za stereoskopski vid, ki ga namerava vgraditi v dražje modele, ki naj bi rešil probleme, ki se pojavljajo pri drugih tipih tipal. Na primer pri radarski anteni, ko se na njej nabere led, zato ta ne deluje, kot bi morala. Sistem ima oznako 6-D, njegovo sliko, ki je podobna tistemu, kar je videl Predator v istoimenskih filmih, pa prikaže zaslon v vozilu. Z barvami med zeleno in rdečo so prikazane razdalje do objektov, ki pa jih ne izračuna radar ali laserski sistem, temveč sistem dveh kamer, ki oponašata človeški vid. Vse spremembe zaradi premikanja vozila so osvežene v realnem času, sistem pa zna prepoznati ovire - od fiksnih do premikajočih -, še preden jih vidi voznik. Sistem sam oceni, kateri predmeti so potencialno nevarni, in jih na zaslonu primerno označi. Zanimivo je, da sistema niso sprogramirali, kako naj deluje, temveč se tudi v tem primeru zanašajo na prej pridobljene in v bazi shranjene podatke. Sistem prepozna pešca na osnovi milijon in pol pravih ali navidezno oblikovanih, ki jih ima v bazi podatkov. To pa pomeni, da je ta sistem sposoben učenja.
Moj mikro, Marec 2012 | Jan Kosmač